Projects
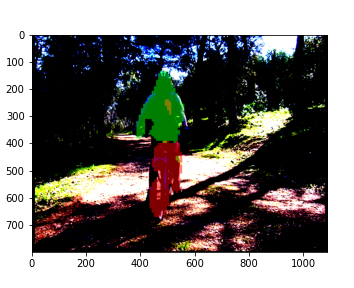
Instance Segmentation
- Implemented a single-stage instance segmentation pipeline "Segmenting Objects by Location" as part of course CIS 680: Advanced Machine Perception, MAP value achieved: 0.46
- Dataset: Subset of COCO dataset with 10,000 images comprising of People, Vehicles, and Animals
- Backbone used: RESNET 50 FPN
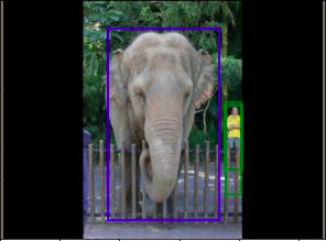
Object Detection: Faster RCNN
- MAP value achieved: 0.76
- Dataset: Subset of COCO dataset with 10,000 images comprising of People, Vehicles, and Animals
- Trained a lighter version of backbone and Region Proposal Network for the first stage and box regresor and classifier for the second stage
- Backbone used for second stage: RESNET 50 FPN
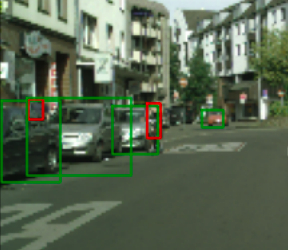
Object Detection: YOLO
- MAP Value achieved: 0.46
- Dataset: 10,000 street scene images with pedestrians, cars, and traffic lights labels
- Implemented the whole pipeline from scratch and compared the performance of classifier in case of different targets for confidence loss
Particle Filter based SLAM
- Simultaneous Localization and Mapping from LIDAR scan and IMU data
- A local map is built for every particle by extending LIDAR scan from particle's position(estimated from odometry information after adding random noise)
- Update of each particle's weight is done based on correlation of local map with best estimate of map
Optical Flow
- Tracking pre-initialized bounding boxes in a video
- KLT tracking algorithm to calculate the Optical Flow
- Similarity Transformation estimation b/w the tracked points in two frames for calculating bounding box movement